ACADIA 2015 WORKSHOPS
ACADIA 2015
COMPUTATIONAL ECOLOGIES, Design in the Anthropocene
CINCINNATI, OHIO October 19-25, 2015
University of Cincinnati SAID
www.acadia.org/acadia2015
WORKSHOP 1 - OPEN GEO DATA + PERFORMANCE by CORE Studio Thornton Tomasetti
Elcin Ertugrul, Integration Engineer at CORE Studio Thornton TomasettiMostapha Sadeghipour Roudsari, Research Associate, University of Pennsylvania, School of Design
Chris Mackey, Building Scientist and Designer at Payette Architects

3 DAY WORKSHOP
DATES: 19-21st OCT
CAPACITY: 12 SEATS
core.thorntontomasetti.com
The workshop focuses on computational tools and workflows for exploring, analyzing and visualizing large, complex and dynamic geospatial data in a parametric visual scripting environment. Through a series of hands-on tutorials, attendees will be introduced to several different methods of quantitative environmental analysis using geospatial 'Open Data' and temporal climate data. Participants will practice different techniques of optimization and solution-finding, such as “brute force and filtering” and “multi-objective analysis” in order to address a number of design exercises presented during the workshop.
Architects, engineers and planners are increasingly using mapping applications to interpret the complex nature of cityscapes and to assist in the development of innovative building solutions. While Open Data, GIS, and climate modeling capabilities have become increasingly available in recent years, the enormous quantity of numeric data still inhibits the extraction of meaningful conclusions and limits the overall accessibility of the data to designers and decision-makers in architecture practices.
The workshop introduces a diverse range of workflows for extracting such meaning, including different modes of spatial data representation, mapping techniques, and the creation of customized visualizations. Such workflows will be set up through the 3D visualization environment of Rhino and the parametric visual scripting environment of Grasshopper, which assists in the management of large datasets. Through a series of hands-on tutorials, participants will visualize building geometry and related urban data such as zoning, density, land-use, and much more. Later, they will generate and integrate their own custom user-defined data into such visualizations. Finally, attendees will use Ladybug + Honeybee to run and large-scale environmental analyses of such geospatial data, interpreting the analysis to yeild better decision making in a design process.
Prerequisite Knowledge: Beginner Rhino & Grasshopper knowledge.
Hardware Requirements: Bring your own laptop with the required software installed. Any machine capable of running these programs is sufficient. Please contact the instructors with questions.
Software Requirements: Rhino 5, Grasshopper 0.9.0076, @it 2.1, Ladybug 0.0.59, Honeybee 0.0.56.
WORKSHOP 2 - BIO-AGENCY by Igor Pantic and Soomeen Hahm with Will Walker and Formlabs
3 DAY WORKSHOP
DATES: 19-21st OCT
CAPACITY: 12 SEATS
www.igorpantic.net
www.soomeenhahm.com
formlabs.com
Bio-Agency will focus on creating architectural objects using the application of agent-based design strategies. Emphasis will be on the exploration of architectural and structural properties of biological behaviours, with the use of agent based algorithms, inspired by natural processes of growth and formation. The study will be conducted through number of specific algorithmic processes, also investigating kinematic and structural behaviours of generated meshes. Through the use of these algorithms, series of systems - digital organisms – will be designed and digitally grown, allowing us to explore and create highly complex design ecologies. The goal of this form finding exercise will be to establish a morphogenetic system, with the capacity to negotiate real-time topological optimization and structural analysis.
By establishing a connection between object-oriented design approach, increased resolution of architectural fabric and computation, we are attempting to create a framework for emergent geometric and spatial conditions derived from the ideas of agency and biomimicry. Participant will design a series of initial geometric systems or 'seeds', which will be paired with several nature inspired behaviours and algorithms. These digitally grown seeds will be subjected to further articulation by simulated deformation, evolving them under the conditions created by the participants.
During the workshop we will be using Processing (Java) as the primary tool for simulation of (multi-agent) algorithmic design processes. The goal is to introduce students to techniques and methodologies of algorithmic design and procedural modelling, through the use and customization of pre-made scripts and enable them for further individual work. Apart from the primary algorithmic sessions, participants will be given the introduction to Maya and Rhino/Grasshopper and their interface with Processing. To aid visualization and form-finding, we will deploy a stereolithographic 3D printer farm. To this end, strategies and tactics for digital fabrication of abstract and architectural models and products will be covered. In tandem with the generative digital pipeline, we will produce tangible models of physical forms in class, testing the boundaries of rapid prototyping.
Prerequisite Knowledge: Previous knowledge in the required platforms is welcomed, but not required.
Hardware Requirements: Laptop with Processing, Maya, Rhino/Grasshopper and KeyShot installed.
Software Requirements: Processing (primary), Maya, Rhino/Grasshopper, KeyShot (supporting software), PreForm (Free download available from www.formlabs.com/software ).
WORKSHOP 4 - DYNAMO: INTRO/ANALYSIS/OPTIMIZATION by AUTODESK
Colin McCrone, Computational Design Evangelist at AutodeskMatt Jezyk, Senior Product Line Manager, AEC Conceptual Design Products at Autodesk
Mehdi Nourbakhsh, Senior Research Scientist at Autodesk
Mohammad Asl, High Performance Building Design Solutions Researcher at Autodesk
3 DAY WORKSHOP
DATES: 19-21st OCT
CAPACITY: 12 SEATS
dynamobim.org
autodeskresearch.com
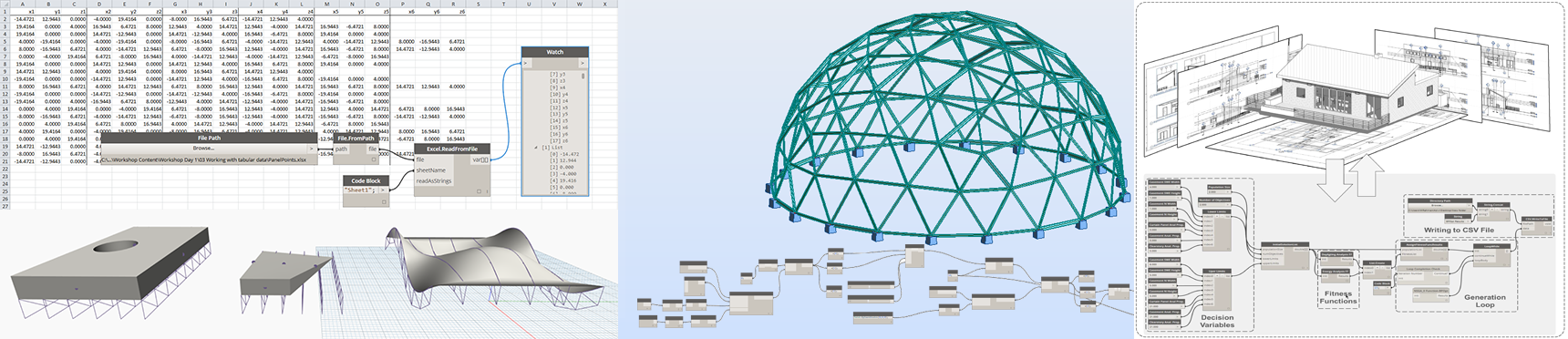
In this three-part, three-day workshop, participants will gain an extensive experience with computational design in a BIM environment using Dynamo. We will begin by level-setting with example workflows of Dynamo with Revit to build intermediate-level skills, then introduce specialized workflows for analysis and optimization.
The introductory part of the workshop will cover basic and advanced data management concepts in Dynamo, a survey of the out-of-the-box geometry and Revit functionalities, and exploration of popular Dynamo extensions. Workflows will include working with structural framing, tabular data, Revit element parameters, and general rules-based design in Revit.
We will deploy Dynamo to manage geometric, solar, structural analysis workflows, using packages and extensions that will be provided by the instructors. Finally, we will combine the power of computation and analysis by constructing routines to optimize designs using genetic algorithms. Stick around for a sneak-peak of Autodesk Dreamcatcher for generative design.
Beginners are encouraged to explore Dynamo before the workshop begins, but rest assured that we will systematically cover all of the basics so that students will understand the range of options that exist to solve problems with Dynamo.
Prerequisite Knowledge: Participants should have a working knowledge of Revit. Those who are familiar with Dynamo and with structural and building performance analysis concepts will get the most out of the experience. To get up to speed on Dynamo, please visit the Dynamo Primer and other learning materials at http://DynamoBIM.org/Learn.
Hardware Requirements: Bring your own laptop with the required software installed. Any machine capable of running these programs is sufficient. Please contact the instructors with questions.
Software Requirements: Revit 2014 or later, Dynamo - most recent official build (http://DynamoBIM.org/Download), Robot Structural Analysis, Microsoft Excel 2010 or later (optional).
WORKSHOP 6 - COMPUTATIONAL BIM IN PRACTICE by GRIMSHAW Architects and NBBJ
Konrad Sobon, Project BIM Specialist at GRIMSHAW ArchitectsNate Holland, Design Computation Leader at NBBJ
3 DAY WORKSHOP
DATES: 19-21st OCT
CAPACITY: 12 SEATS
dynamobim.org
grimshaw-architects.com
www.nbbj.com
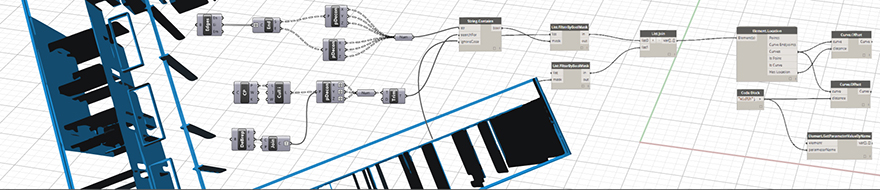
Learn from computational design practitioners how to leverage tools like Dynamo and Grasshopper to get more out of Rhinoceros and Autodesk Revit. Participants will be guided through a set of design tasks from concept to documentation that require unique solutions and benefit from a computational approach.With examples inspired by issues encountered in practice, the workshop will explore topics including designing with geometric constraints, constructability, data interoperability, automation, custom analysis, and project team collaboration. You will hear the insider tips on where to go for information, what software developments to watch, and how to contribute back to the computational design community.
Prerequisite Knowledge: Participants should have a working knowledge of Rhinoceros and Autodesk Revit. Participants should be familiar with at least one of Dynamo and Grasshopper, including basic concepts of scripting and geometry. Designers new to scripting should prepare with tutorials and learning resources for Dynamo and Grasshopper, which can be found online.
Hardware Requirements: Bring your own laptop with the required software installed. Any machine capable of running these programs is sufficient.
Software Requirements: Revit 2016, Rhino 5 x64, Grasshopper 0.76, Dynamo 8.2 stable, Excel 2013.
WORKSHOP 7 - PROTOTYPING EXPERIENTIAL FUTURE by Woods Bagot and CORE Studio Thornton Tomasetti
Shane Burger, Director of Design Technology at Woods BagotAna Garcia Puyol, Computational Designer at CORE Studio Thornton Tomasetti

3 DAY WORKSHOP
DATES: 19-21st OCT
CAPACITY: 12 SEATS
www.woodsbagot.com
core.thorntontomasetti.com
The field of Interaction Design (IxD) has come to dominate our experience of the digital world. As our physical world increasingly takes on digital threads in our everyday experiences, the role of the architect needs to actively engage IxD for the built environment. We need to move from prototyping form to prototyping experience.
This workshop will engage that new role by providing a simulation space for an architecture of dynamic experiences. Through the use of a realtime visualization engine, workshop participants will design interactive environments to simulate active engagements within dynamic spaces. Dynamics could range from functional to comfort to more playful and artistic virtual installations that will allow for creative collaboration between participants.
Workshop participants will learn the basics of interactivity in Grasshopper, and how to connect their responsive designsto a custom-made WebGL environment. This will then be experienced within Virtual Reality environments using our mobile phones in combination with inexpensive VR hardware such as the Google Cardboard. Our prototype space will use an existing model of the DAAP Aronoff Center, our hosts for the ACADIA Event.
Prerequisite Knowledge: Beginner Rhino & Grasshopper knowledge.
Hardware Requirements: Bring your own laptop as well as a cellphone and cellphone charger.
Software Requirements: Rhino 5, Grasshopper 0.9.0076, and Google Chrome installed on both the laptop and phone.
WORKSHOP 9 - KANGAROO2: FORM-FINDING AND CONSTRAINT BASED MODELLING by Daniel Piker (McNeel)
2 DAY WORKSHOP
DATES: 20-21st OCT
CAPACITY: 12 SEATS
www.rhino3d.com
www.grasshopper.com
www.kangaroo3d.com
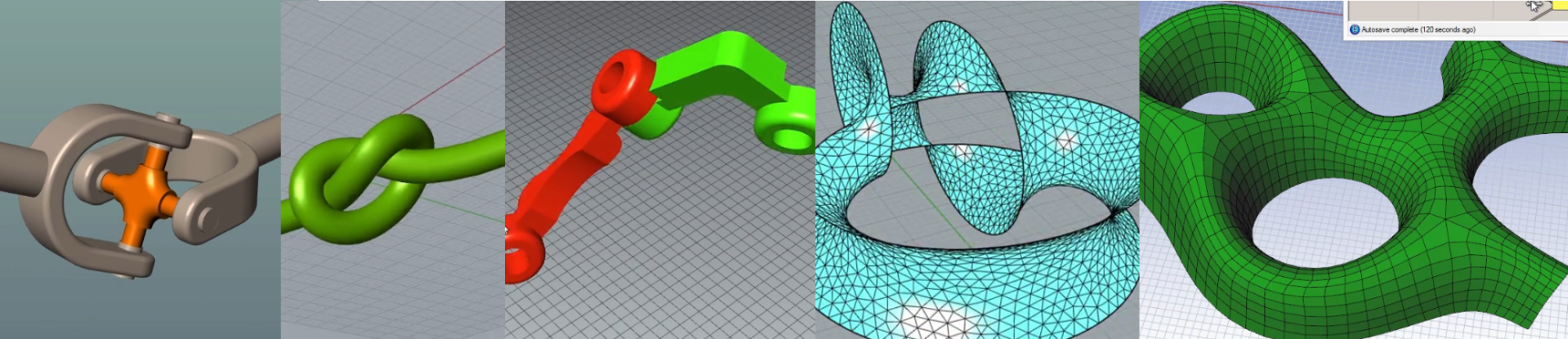
The new version of Kangaroo extends its form-finding capabilities to include geometric constraint modelling, linkages and assemblies, in addition to improving tools for shaping with physical forces and optimisation for fabrication. Participants in this workshop will learn the capabilities of this new solver from its author, including an introduction to extending and customizing it through scripting, and will have the opportunity to start applying it to their own projects.
Prerequisite Knowledge: Basic Rhino and Grasshopper skills.
Hardware Requirements: Bring your own laptop.
Software Requirements: Rhino 5, Grasshopper 0.9.0076.
WORKSHOP 10 - ROBOTIC WOODCRAFT
Sigrid Brell-Cokcan, Univ.Prof. Dr.techn., Association for Robots in Architecture, Chair of Individualized Production IP RWTH AachenJohannes Braumann, Association for Robots in Architecture, University for Arts and Design Linz
Daniel Goldbach, IP RWTH Aachen
Elisa Lublasser, IP RWTH Aachen

3 DAY WORKSHOP
DATES: 19-21st OCT
CAPACITY: 12 SEATS
www.robotsinarchitecture.org
wwww.roboticwoodcraft.com
www.ip.rwth-aachen.de
The idea of this workshop will be to use a small machine to create a large, wide-spanning structure. To achieve this goal, we will create a fabrication logic that utilizes the strengths of robotic arms – accuracy, kinematic flexibility, and ease of programming – to facilitate the human on-site assembly. This workshop builds upon the results of Robotic Woodcraft, a transdisciplinary research project conducted by the Association for Robots in Architecture and the University for Applied Arts Vienna.
Robotic arms are best known from the automotive industry, where they are used to perform repetitive task with high accuracy and repeatability. Today, these multifunctional machines open up new possibilities for young designers and architects, as they enable completely new fabrication strategies at a much lower cost than most multi-axis CNC machines. A crucial step towards establishing robotic arms as valuable machines for the creative industry is the development of new software that goes beyond the scope of common CNC software. This workshop will introduce participants to KUKA|prc (parametric robot control), a robot-control and simulation plugin that extends the accessible parametric modelling environment Grasshopper beyond design. While common CAD-CAM workflows rely on multiple software packages to pre- and postprocess data, the integration of robotic fabrication into a parametric environment allows designers to create new workflows that inherently consider the constraints of fabrication processes and can be constantly evaluated and optimized in regards to e.g. reachability and kinematics. We refer to such a process as production immanent design. These highly optimized processes allow designers and architects to economically realize designs with a degree of customization and individualization that would otherwise be impossible to do with industry-standard CAM-software.
Prerequisite Knowledge: Basic knowledge of Rhinoceros and Grasshopper is recommended, but not required. No previous robot-knowledge is necessary.
Hardware Requirements: Participants are required to bring their own laptops that are capable of running Rhino 5 and Grasshopper. Mac-users must have Windows installed via Bootcamp or as a virtual machine.
Software Requirements: 90-day Rhinoceros 5 trial versions are available. All robot-related software and course material will be made available at the workshop site.